|
|
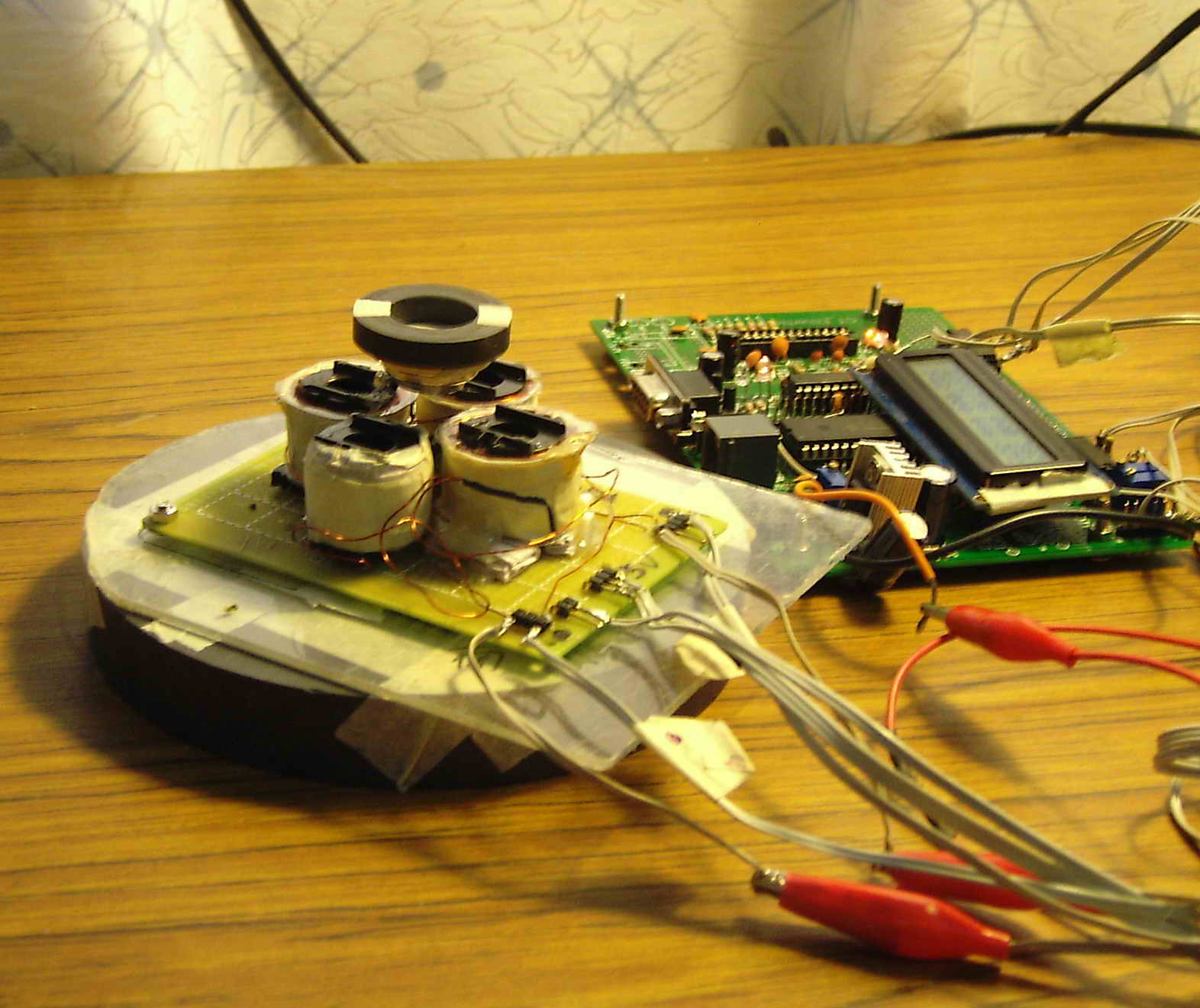
这是用PIC18F4520(最小系统)控制的下推式磁悬浮实验, 参照了<STM8下推式磁悬浮实验>
所用器件: PIC18F4520最小系统一套
霍尔元件3503 二个
LM324运放一个
线圈空心四个
环形普通磁铁一个(外140*内70*高20)
293D 驱动模块一个
悬浮磁铁一套(三个强磁,一个普磁,重38g)
12V 直流电源一个
工作电流: 空载 110ma, 有悬浮物时 190ma
电路原理: 与<STM8下推式磁悬浮实验>相似,3503经运放LM324(放大20倍)到PIC18F4520,
PIC18F4520的两路PWM信号经293D驱动, 带动两组线圈,每组含两个线圈(同名端相连),
实现一推一拉的功能, 霍尔元件安装时一定要安在线圈中部的高度, 磁悬浮物要有一定的重量
这样比较容易稳定
MCU参数: 核心频率40MHz(每条指令占四个周期), AD采样0--5V, 时钟中断频率2.881KHz
时钟中断程序是整个程序的主循环过程, PWM频率与时钟中断频率相同,为2.881KHz
本实验的磁悬浮物运行一小时后还悬浮在线圈上面, 但会有抖动现象, 稳定性需要进一步提高
在此感谢咕唧霖的热情指导
下推式磁悬浮实验视频ourdev_520789.RAR(文件大小:2.30M) (原文件名:下推式磁悬浮.RAR)
 |
|
|








 发表于 2015-4-9 19:36:09
发表于 2015-4-9 19:36:09

 收藏
收藏 分享
分享 支持
支持 反对
反对