|
开发背景:随着现代技术的飞速发展,数字化、信息化和网络化正日益融入我们的生活,人们对生活的品质和质量也有了更高的要求,智能化系统就是在这样的背景下产生的,而且其需求也在不断增长,智能化的内容也有了不同的概念。本次设计是以小车位模版来实现智能化控制。
结构说明:小车结构主要分为四部分:控制部分(单片机及简易遥控器,红外接收与发射模块),执行部分(四轮驱动),电源部分(4节5#电池供电),辅助部分(外围电路)。 控制部分:小车以单片机为整个系统的控制核心,以红外接收与发射系统来辅助单片机的控制,控制小车的运动,实现设计性能。单片机主要采用STC系列最新芯片15F2K61S2。红外接收与发射系统主要体现在两方面:一,在小车上方有两个红外发射器和一个红外接收器,使用遥控器来控制小车的运动,接收器会接收到信号,控制小车的运行。红外发射器主要是用于检测前方是否有障碍,前方有障碍,红外接收器会接收到信号,小车会自动改变方向。二,在小车底盘有4个高亮LED,和9个红外接收器。LED发出光,如果有黑色物体无法术反射光,接收器无法采集到信息,小车就会按照黑线的方向运行。 执行部分:主要体现在小车的运行方面,本设计采用四轮驱动,在小车的每个轮子的旁边会有一个小型电机.当小车向前或向后运动时,四轮同时转动;当小车向左拐弯时,左侧两轮停止运动,右侧两轮继续转动,实现向左转换方向;小车向右拐弯同样道理。 电源部分:系统采用5V直流电压供电,4节电池,通过7805芯片转换为5V电压。 辅助部分:由分压电阻及滤波电容及其他元器件组成。 使用说明: (1)按“前后左右”键,实现手动遥控控制。小车上方有红外接收器,当你按一下按键,红外接收器会接收到信号并将信号传给单片机,单片机控制小车向对应的方向前进。如果对应的方向出现障碍,小车会自动停止运动。按“确认”键小车会停止运动。 (2)按“图片”键,小车会进入自动运行模式,在前进的方向如果遇到障碍物,小车主板上面的2个LED会常亮,红外接收器接受到信号并将信号传给单片机,单片机控制小车改变前进方向,实现了智能避障功能。 (3)按“音乐”键,小车会自动运行寻线模式,小车底盘上面的4个LED发出光,9个红外接收器接收反射光线,如果地面上有黑线,上方部分红外接收器无法采集到反射光线,小车就会继续沿前进,直到黑线终止,实现自动寻迹功能。
平台选型说明
采用大赛指定单片机芯片STC15F2K61S2设计。
设计说明
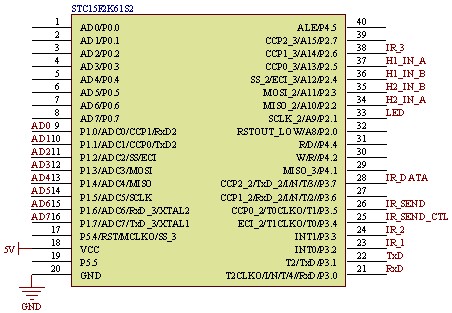
智能小车设计原理描述:在小车外围线路连接处有一白色按钮,为小车总开关,小车的上方有本次设计所使用的单片机,它是我们设计的核心,当开关闭合时,小车开始工作,此时按遥控器上所对应的按键,由红外接收系统来接受遥控器所发出的信号,并将信号传给单片机,通单片机内部程序对信号进行分析,实现相应的功能。 智能小车主要由控制模块、驱动模块、红外遥控模块、智能避障、自动寻迹模块构成。 控制模块: 控制模块主要采用STC15F2K61S2作为小车的控制中心,由电源模块供电,红外遥控模块采集数据,实现手动遥控,智能避障,自动寻迹功能。 STC15F2K61S2芯片 芯片描述:SC15F2K61S2单片机是STC生产的新一代8051单片机,指 令代码完全兼容传统的51单片机,超强抗干扰,高速,高可靠,低功耗,速度比平常单片机快8—12倍。 特点:(1)大容量2048字节片内RAM数据存储器 (2)在线编程,无需编程器和仿真器 (3)用户可在用户区直接编辑修改用户程序 (4)增强型8051内核,速度比平常的8051单片机快7 —12倍 (5)告诉ADC,共8通道10位 (6)USB线可实现系统供电,程序下载,通信功能 (7)接口扩展齐全 (8)不需要外部晶振和复位电路 (9)低功耗 ,低价格
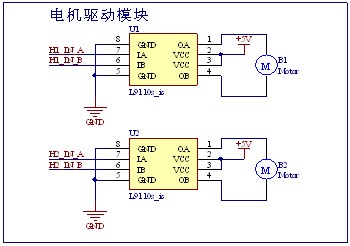
驱动模块: 小车的驱动模块主要包括电机驱动小车前进,本次设计采用L9110S驱动电机。驱动小车有三种方案。 方案一:普通玩具小车是使用两个电机,且两个电极均为玩具直流电机。前面两个轮为一个电机控制,用来控制方向,后面两个轮由一个电机控制,用来驱动小车,这就是传统的控制小车方向的方式,缺点是转向过于敏感。 方案二:采用两电机三轮驱动,即前面安装一个万向轮,由一电机控制,后面两轮由一个电机控制,这种驱动方式的优点是转向性较好,可以实现原地360°转向,且外部辅助电路也比较简单。 方案三:四电机四轮驱动,这种方案适合功能比较强大,且由单片机控制的小车使用,因为这种方案可以更加灵活的控制小车,而且转向性好,也可以实现原地360°转向。 综合以上三种方案:首先排除方案二,因为本设计一开始的定位是要采用四轮驱动小车。对于方案一,首先,这种驱动方式制作起来比较简单,但是这种方式比较传统;另外本设计需要小车实现较多的功能,这种传统方案无法实现。方案三因为本次设计是用单片机作为总控制中心,能够使之达到运行灵活平稳,安全高效的效果.综合比较,我选择方案三。 L9110S芯片: 芯片描述:L9110S是为控制和驱动电机设计的两通道推挽式功率放大专用集成电路器件,将分离电路集成在单片IC之中,使外围器件成本降低,整机可靠性提高。该芯片具有良好的抗干扰性,两个输出端能直接驱动电机的正反向运动及刹车,具有较大的电流驱动能力。
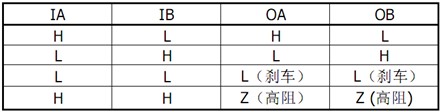
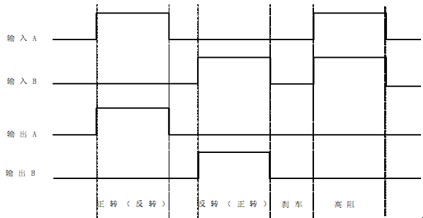
逻辑功能真值表:
波形图:
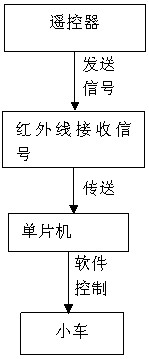
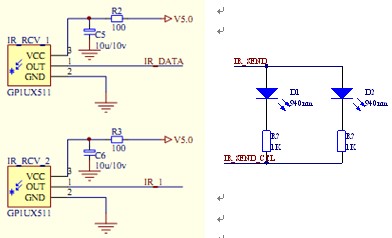
红外遥控模块: 智能小车是由遥控器来遥控驱动,实现手动遥控控制。手动遥控主要是采用红外发射接收系统来实现。 红外简单发射接收原理:在发射端,输入信号经过放大后送入红外发射管,在接收端,接收管收到红外信号后,由放大器放大处理后还原成信号,这就是红外的简单发射接收原理。 红外线的特点:不干扰其他电器设备工作,也不会影响周边环境。红外遥控模块流程图:
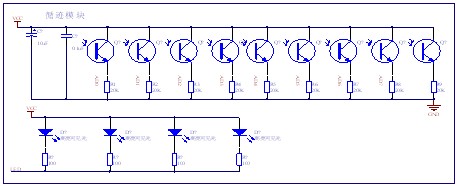
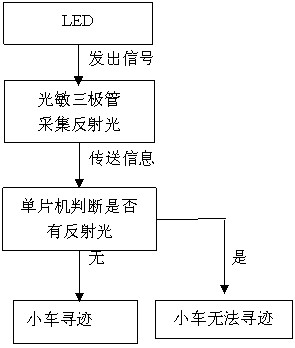
自动寻迹模块: 小车实现自动寻迹功能是指小车在白色地板上循黑线行走。小车实现小车的寻迹功能主要有两种方案。 方案一:光电探测方案。有4个LED作为光源发射端,8个光敏三极管作为接收端。优点是检测和接受速度快。 方案二:摄像头方案。优点是检测距离长,范围宽,检测道路参数多,但本方案电路设计复杂,监测信息更新速度慢,软件处理数据比较多,占用单片机CPU较多。 综合以上两种方案:本次设计采用单片机控制,小车要实现寻迹功能,为了方便高效实现,需要将接收管放置在小车底盘,针对这一点,方案一比较合适。从经济角度讲,摄像头价格过高,外部辅助电路及软件控制程序都比较复杂,光电探测方案所需的LED及光敏三极管价格较低,经济实惠,且软件程序简便。 所以,本次设计采用方案一。 光电探测法设计原理:利用可见光在不同颜色的物体表面具有不同的反射强度的特点,在小车行驶过程中不断向地面发射光线,当光线遇到白色地板是发生漫反射,反射光被装在小车底盘上面的接收管接收,并将信号传给单片机;如果遇到黑线则光线被吸收,小车底盘上的光敏接收管接收不到反射光,无法将信号传给单片机。单片机就是否接收到反射回来的光为依据来确定黑线的位置和小车的行走路线。
寻迹模块流程图:
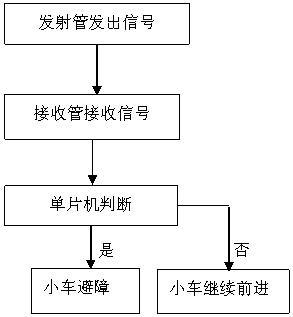
智能避障模块: 小车实现智能避障是指:小车在前进时,如果出现障碍,可以自动改变方向。 小车实现避障功能主要有两种方案: 方案一:采用一只红外对管置于小车中央。其安装简易,也可以检测到障碍物的存在,但难以确定小车在水平方向是否会与障碍物相撞,也不易让小车做出精准的转向反应, 方案二:采用两只红外发射管分别置于小车前端两侧位置,一只红外接收管置于中央,方向与小车前进方向平行,对小车与障碍物相对距离和方位能做出比较准确的判别和及时反应,但需要复杂的外围电路。 比较两种方案:方案一外围电路简单,但缺乏创造性,且不能准确的实现避障功能。方案二虽然需要外围电路及硬件来实现,但因为本次设计是需要单片机来控制,所以外围电路可以通过单片机用软件来实现。所以,综合比较,我选择方案二。
避障模块流程图:
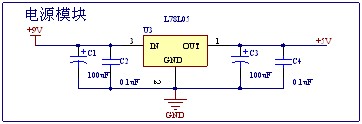
辅助系统: 辅助系统主要包括小车的供电和外围辅助电路。 小车供电有两种方案: 方案一:采用实验室有线电源通过稳压芯片供电。 方案二:采用4节1.5V电池供电。 综合两种方案:方案一可以提供稳定的5V电压,但占用资源过大,不简便。方案二简便易操作,从经济角度讲,应当采用可充电电池。通过比较,我们采用方案二。
外围辅助电路主要是指小车硬件电路的焊接,单片机与各模块之间的电路的连接。 本次设计通过以上各模块结合实现手动遥控、智能避障、自动寻迹功能,基本实现智能化。我们还可以通过增加模块实现语音控制,太阳能智能充电等功能。
作品特色
智能小车是基于单片机技术、无线通信技术、多种传感器检测技术为一体,实现智能分析外部环境信息、实时采集传感器信号、自动实现方向控制等功能。我们本次设计的智能小车采用了STC15F2K61S2的芯片。 一 :先进性 小车采用了红外感应系统,红外装置具有体积小,功耗低,功能强,成本低等特点,而且在高压,辐射等环境下,采用红外装置不仅可以完全可靠而且能有效的隔离电气干扰,使我们所设定的功能更加准确高效的实现。 二 :实用性 小车实现了智能控制,能按照我们所设定的路线按迹前行,而这一功能的成功运用,可以使小车在无须人为的控制,也能按照我们的愿望非常顺利的完成这一功能。 三 :创新性 智能小车的避障功能也采用了红外感应装置,由小车自动发射红外线检测前方是否有障碍物。通过单片机对信号的分析,控制小车的前进方向。 智能小车其设计内容涵盖了控制、模式识别、传感技术、计算机、机械等多个学科的知识,对学生的知识融合和实践动手能力的培养,具有良好的推动作用。
| 







 发表于 2015-3-28 13:57:06
发表于 2015-3-28 13:57:06


 收藏
收藏 分享
分享 支持
支持 反对
反对