应用于类似自动门控制开关、安全防范系统、ATM自动提款机的自动录像控制系统、火车自动信号机等,需要自动感应控制的场所。这是一种标准的24GHz雷达传感器,这种探测方式与其它探测方式相比具有如下的优点:1、非接触探测;2、不受温度、湿度、噪声、气流、尘埃、光线等影响,适合恶劣环境;3、抗射频干扰能力强;4、输出功率仅有10mW,对人体构不成危害;5、远距离:探测范围超过20米。
多普勒原理简介:多普勒理论是以时间为基础的,当无线电波在行进过程中碰到物体时,该电波会被反射,反射波的频率会随碰到物体的移动状态而改变。如果无线电波碰到的物体的位置是固定的,那么反射波的频率和发射波的频率应该相等。如果物体朝着发射的方向移动,则反射回来的波会被压缩,就是说反射波的频率会增加;反之,当物体朝着远离发射的方向移动时,反射回来的波的频率会随之减小,这就是多普勒效应。这种现象在日常生活中会经常遇到,比如一辆鸣笛的警车从你身边高速通过时,你听到的声音的频率是变化的:当警车高速接近你的时候,(与静止声源相比)声音传输的时间缩短,频率升高。当警车远离你的时候,声音的传输时间拉长,频率降低。
》直流5V低功耗,或用频率为2K占空比为2%的5V间歇供电功耗更低;
》工作频率为24.125GHz,低穿透性因而保证低误报率;
》周围环境:不受热、嗓音、湿度、气流、尘埃等影响,适合恶劣环境;
》强抗干扰,灵敏度高且性能极为稳定;
》性价比极高的低成本移动检测器;
》宽范围:探测范围可达18米或更远;
=============================================================================================================
应用实例一:自动门控制、ATM提款机自动录像控制
本电路作用距离4-15米连续可调,和热释电红外探测器相比,具有抗强光干扰,探测距离远,不受温、湿度影响等优点。
电路原理简述:图中U1是微波感应探测器模块,通过K202,K203,R202,R219向模块提供2kHz 的脉动电源(能产生频率为2khz 高电平宽度为20uS的电路很多,如使用反向器CD4069、lm555 等),K201在U1起作用期间导通,把U1输出的反应物体移动的低频信号选通输出, C202为采样保持电路, 保证信号的连续和完整。由LM358组成的两极低通放大电路把U1的输出放大,在LM358的1脚输出。可调电阻R213 用于调整一级放大器的增益,调整R213的大小可以调整探测距离。
(原文件名:l1.gif)
应用实例二:火车自动信号机开关电路
作用距离:1-9米连续可调。这种电路的抗干扰能力更强,调整范围更大,可以应用于野外和条件较为恶劣的场所使用。
原理简述:上图是一个完整的应用电路,U3D(LM339)及周围相关元件组成2kHz 低占空比振荡器,P1,P2 提供脉动电源和选通。E9为采用保持电容,反应物体移动的低频信号经过LM324 A、B 及周围元件组成的低通放大电路放大后,到由LM324 C 及周围相关元件组成的比较器。C9-C12,R32-R35组成的低通滤波网络虑除工频干扰信号。由U3A组成的延时电路保证了发现物体移动后电路有相当时间的稳定输出。 由U1A及相关元件组成的第一级放大电路,其增益A1A≈R30/R31=375/473=78.7;第二级放大器由U1B及相关电路组成,放大增益A1B≈R36/(R35+R34)=475/943=50;两级放大的增益为A=78.7×50=3935,即为36db。由U1C及R39、R40、P2、E12组成的电压比较器,把前级放大的信号变换成脉冲信号,再由U3A及相关元件组成的延时电路延时输出。
调整P2可以改变探测距离的大小,改变R41、E13、R42的大小可以调整输出时间的长短。
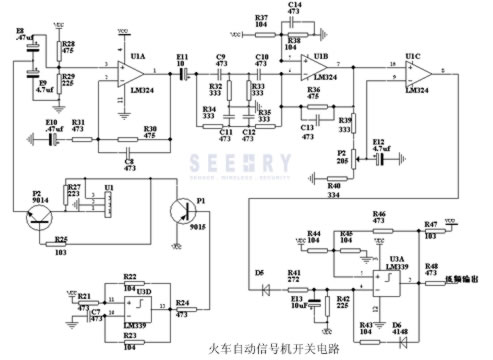
(原文件名:l2.jpg)
应用实例三:三鉴探头
原理概述:三鉴是指红外主导、微波辅助、单片机智能处理(PIR/MW/AI)的综合探测技术,当被动红外发现目标后启动微波检测电路,当两种信号均有效并通过单片机智能处理符合报警输出条件时,由单片机给出报警信号。
电路简析:本电路中被动红外(PIR)信号经滤波后直到单片机的比较器的输入口17、18脚,比较器把红外头感应到的信号直接转换为脉冲信号,数字信号经MPU PIC16C622A 的处理,利用软件可以进行出、入识别以及干扰的虑除。RB1输出2kHz占空比为5%的脉冲(宽度为20uS),驱动P2给微波探测器提供脉冲电源。微波探测器的低频输出通过P1选通输出到C101采用保持电容上。反应物体移动的低频信号经U1A及相关元件组成的可编程运算放大器放大,再经U1B组成的比较器进行电平转换,转换后的脉冲信号到PIC16C622 的RB3脚输入到MPU。
当红外发现目标后,RB1输出高电平,三极管K3导通,由U1A组成的可编程放大器的增益由100倍增加到10000倍左右,微波探测器电路开始工作,MPU开始检测物体移动信号。MPU通过对PIR信号分析,可以判断出红外源的出入情况,以此可以排除热空气以及非热源移动物体的干扰(如飘动的窗帘、转动的电扇等),同时综合微波探测器的信号,可以排除多种热源的干扰。
合理的MPU数学模型和编制科学的软件,可以识别出体重小于20kg宠物。基本上可以消除宠物的引起的误报。
本电路中改变P1的大小,可以改变放大电路的增益,从而调整微波电路的探测距离。

(原文件名:l3.jpg) |
|
|
|








 发表于 2016-5-28 22:27:24
发表于 2016-5-28 22:27:24

 收藏
收藏 分享
分享 支持
支持 反对
反对