利用调压法(控制导通角)来控制可控硅产生所需的市电整流直流电压:
调压法(控制导通角)则是控制每一个半波的导通时间(0-180),控制周期为一个半波时间,即10ms;
由于可控硅只能在过零点关断,所以一般做法是:
1.单片机检测到过零点,
2.定时器延时一段时间后给出一个脉冲,使可控硅导通,
3.之后维持低电平,则220V过零时,可控硅自动关断,
4.重复第1步。
如下图所示:
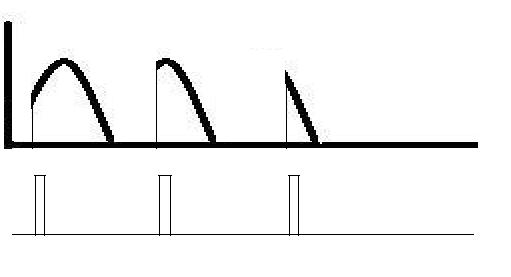
可控硅控制导通角波形 (原文件名 urdev_316502.JPG) urdev_316502.JPG)
采用位置式或增量式输出方式,位置式公式原型:u(t) = kp * e(t) + ki * [e(1) + e(2) + ....+ e(t)] + kd * [e(t) - e(t-1)],问题是我怎样来得到KP,KI,KD这些参数,又怎样量化计算结果u(t),使之成为我所需要得延时时间来产生一个触发脉冲?我是PID的初学者,希望高手能仔细把思路讲解一下,先谢了! |
|
|
|








 发表于 2016-5-5 22:23:54
发表于 2016-5-5 22:23:54

 收藏
收藏 分享
分享 支持
支持 反对
反对