|
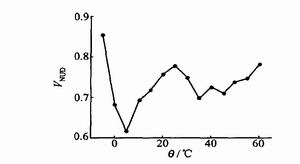
2. 1 实验系统及方案 为了方便完成在设计阶段的单模块调试, 实现遥感系统地面原理与性能测试, 本文采用PC机模拟星上数据处理系统, 利用CAN 卡将CMOS 相机与PC机相连, 建立了一套CMOS遥感系统地面测试系统。 本文采用德国Vtsch IndustrietechnikVT7034 型恒温实验箱, 在60~- 5℃温度区间内,每下降5℃采集一组暗图像。热循环实验之所以按照从高温到低温的顺序进行, 是因为实验所用恒温箱不能抽真空。如果反过来进行实验, 尽管不断向恒温箱内充氮气, 箱内微量空气中的水气仍可能凝结在相机上, 影响实验结果。 2. 2 特征参数的提取 1) 平均暗输出 平均暗输出是在没有光照的条件下图像传感器输出的平均灰度值, 可由下式进行计算: 其中: I i,j是图像传感器在无光照条件下输出的暗图像灰度值矩阵, M 、N 是图像传感器像素阵列的行数和列数。 2) 暗不一致性 理想情况下, 在无光照的时候图像传感器的输出也应该是均匀的。但是图像传感器的像素间总是存在差异的, 因此暗输出总有波动。波动的大小表明图像传感器像素性能的稳定性, 计算方法是求出暗图像各像素输出灰度值的标准差 其中各符号的含义与暗噪声计算式(5) 相同。 2. 3 实验结果及分析 按照2. 1 所述的方案进行实验, 得到了CMOS相机在60~- 5 ℃温度区间内平均暗输出以及暗不一致性随温度的变化曲线, 分别如图5、图6 所示。 图5 平均暗输出随温度的变化曲线 图6 暗不一致性随温度的变化曲线 从图中可以看出, 平均暗输出随着温度的升高大致呈上升趋势。当温度小于10 ℃时, 平均暗输出上升速度较快;10~ 15 ℃上升趋缓;从15 ℃开始略有下降,到30 ℃时达到低谷,10~30℃之间,总的来说平均暗输出值变化比较平稳; 30 ℃以上, 平均暗输出值又以较快的速度上升。本文选用的CMOS图像传感器为256 级灰度输出, 实验中平均暗输出的变化范围为7.7567~10.1092。 平均暗输出之所以随着温度的升高大致呈上升趋势, 是因为温度升高, CMOS图像传感器及其外围电子器件的热噪声都会升高; 而平均暗输出在10~30 ℃之间变化比较平稳, 甚至在15~30 ℃之间略有下降, 是因为CMOS图像传感器在设计上的特殊考虑保证了其在常温下具有最优的工作性能;这同时也说明了这套遥感系统的电噪声主要来源于CMOS图像传感器。 暗不一致性随温度的变化不大, 实验中其变化范围为0.6148~0.8542,比平均暗输出低一个数量级, 可以忽略。 实验中还测试了CMOS相机的耐低温性能。关机后将相机降温至- 25 ℃,达到温度平衡后再升温至0 ℃,开机采集图像, 分析其性能变化。实验测得经受低温后, CMOS相机在0℃下的平均暗输出为7.2323, 比先前略有降低; 暗不一致性为0.8781,比先前略有增大。由于实验中暗不一致性始终比平均暗输出低一个数量级, 其变化相对平均暗输出可以忽略, 所以这个结果说明关机状态下低温环境不会对CMOS相机的成像质量产生显著的不良影响。综上所述, 本文设计的这套CMOS遥感相机在10~30℃之间平均暗输出变化平稳, 暗不一致性可以忽略,有利于对成像质量的控制和校正,是理想的成像温度范围。 3 结论与展望 本文设计了一套纳型卫星CMOS遥感系统, 体积为62mm×62mm×35mm,功耗小于0.6W, 质量小于150g,采用10μm像素尺寸、1024×1024像素数目的CMOS图像传感器, 光谱响应范围为400~800nm,配合焦距为50mm的镜头,在800km的太阳同步轨道上,可以实现大于150km×150km的地面覆盖面积和优于 160m 的地面分辨率,适于纳型卫星获取多光谱和彩色的普查信息。热循环实验表明, 该CMOS遥感相机能够耐受空间环境中- 25~60 ℃的卫星舱内温度变化, 在10~30 ℃的温度范围内工作稳定,可通过地面测试数据对其在空间获取的图像进行校正补偿。 由于国际上对CMOS图像传感器在航天领域的应用研究较少, 所以设计出来的CMOS相机在上天之前, 还需要研究其热真空性能和抗辐照性能, 提出相应的补偿、加固措施。
| 







 发表于 2015-10-12 19:03:46
发表于 2015-10-12 19:03:46




 收藏
收藏 分享
分享 支持
支持 反对
反对