(原文件名:CPLD脉冲波形图.JPG)
| 1.数控运动控制原理 (1)将运动轨迹细分为每段0.5mm或1mm,无论是圆弧还是直线,都按直线(X,Y)来插补; (2)将这一个细分的线段(X,Y)分解为坐标的脉冲值(Px,Py); (3)在同一个细分的时间段(如10ms)同时产生Px和Py个脉冲,驱动XY方向步进电机; 2.实现方法 (1)打印机并行接口直接驱动计数器8254产生脉冲,CLK频率4MHz,输出脉冲200-500kHz (2)串行口驱动CPLD产生脉冲和数字量I/O (3)单片机可脱机控制方案(带有PPG或者2CH 16Bit Timer) 以上方案都可以在运动中无极调速(0-24m/min),有梯形或S形加减速控制。 |
(原文件名:CPLD脉冲波形图.JPG) |
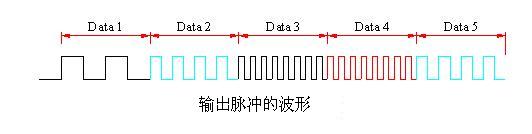
| CPLD脉冲发生器可以产生1~4路脉冲信号。脉冲是由上位机(IMB-PC机)通过RS232串行接口传送的命令数据来设定的。命令数据是接连不断传送的,每一组数据决定一段脉冲的频率、数量和方向。在一组数据执行期间,脉冲频率和方向是不变化的,下一组数据可以改变脉冲频率和方向,1楼的波形图是由5组数据产生的脉冲波形示意图。一组数据执行时间最快约10ms,每组脉冲所用时间并不一定相同。串口通讯波特率约定为38400 b/s 。 |
| 欢迎光临 中科因仑“3+1”工程特种兵精英论坛 (http://bbs.enlern.com/) | Powered by Discuz! X3.4 |