中科因仑“3+1”工程特种兵精英论坛
标题:
光电编码器在电机控制中的应用
[打印本页]
作者:
XJzy
时间:
2015-11-15 22:28
标题:
光电编码器在电机控制中的应用
[导读]
光电编码器在电机控制中的应用 电机的位置检测在电机控制中是十分重要的,特别是需要根据精确转子位置控制电机运动状态的应用场合,如位置伺服系统。电机控制
光电编码器在电机控制中的应用
电机的位置检测在电机控制中是十分重要的,特别是需要根据精确转子位置控制电机运动状态的应用场合,如位置伺服系统。电机控制系统中的位置检测通常有:微电机解算元件,光电元件,磁敏元件,电磁感应元件等。这些位置检测传感器或者与电机的非负载端同轴连接,或者直接安装在电机的特定的部位。其中光电元件的测量精度较高,能够准确的反应电机的转子的机械位置,从而间接的反映出与电机连接的机械负载的准确的机械位置,从而达到精确控制电机位置的目的。在本文中我将主要介绍高精度的光电编码器的内部结构、工作原理与位置检测的方法。
一、光电编码器的介绍:
光电编码器是通过读取光电编码盘上的图案或编码信息来表示与光电编码器相连的电机转子的位置信息的。根据光电编码器的工作原理可以将光电编码器分为绝对式光电编码器与增量式光电编码器,下面我就这两种光电编码器的结构与工作原理做介绍。
(一)、绝对式光电编码器
绝对式光电编码器如图所示,他是通过读取编码盘上的二进制的编码信息来表示绝对位置信息的。
编码盘是按照一定的编码形式制成的圆盘。图1是二进制的编码盘,图中空白部分是透光的,用“0”来表示;涂黑的部分是不透光的,用“1”来表示。通常将组成编码的圈称为码道,每个码道表示二进制数的一位,其中最外侧的是最低位,最里侧的是最高位。如果编码盘有4个码道,则由里向外的码道分别表示为二进制的23、22、21和20,4位二进制可形成16个二进制数,因此就将圆盘划分16个扇区,每个扇区对应一个4位二进制数,如0000、0001、…、1111。
图1
按照码盘上形成的码道配置相应的光电传感器,包括光源、透镜、码盘、光敏二极管和驱动电子线路。当码盘转到一定的角度时,扇区中透光的码道对应的光敏二极管导通,输出低电平“0”,遮光的码道对应的光敏二极管不导通,输出高电平“1”,这样形成与编码方式一致的高、低电平输出,从而获得扇区的位置脚。
(二)、增量式光电编码器
增量式光电编码器是码盘随位置的变化输出一系列的脉冲信号,然后根据位置变化的方向用计数器对脉冲进行加/减计数,以此达到位置检测的目的。它是由光源、透镜、主光栅码盘、鉴向盘、光敏元件和电子线路组成。
增量式光电编码器的工作原理是是由旋转轴转动带动在径向有均匀窄缝的主光栅码盘旋转,在主光栅码盘的上面有与其平行的鉴向盘,在鉴向盘上有两条彼此错开90o相位的窄缝,并分别有光敏二极管接收主光栅码盘透过来的信号。工作时,鉴向盘不动,主光栅码盘随转子旋转,光源经透镜平行射向主光栅码盘,通过主光栅码盘和鉴向盘后由光敏二极管接收相位差90o的近似正弦信号,再由逻辑电路形成转向信号和计数脉冲信号。为了获得绝对位置角,在增量式光电编码器有零位脉冲,即主光栅每旋转一周,输出一个零位脉冲,使位置角清零。利用增量式光电编码器可以检测电机的位置和速度。
二、光电编码器的测量方法:
光电编码器在电机控制中可以用来测量电机转子的磁场位置和机械位置以及转子的磁场和机械位置的变化速度与变化方向。下面就我就光电编码器在这几方面的应用方法做一下介绍。
(一)、使用光电编码器来测量电机的转速
可以利用定时器/计数器配合光电编码器的输出脉冲信号来测量电机的转速。具体的测速方法有M法、T法和M/T法3种。
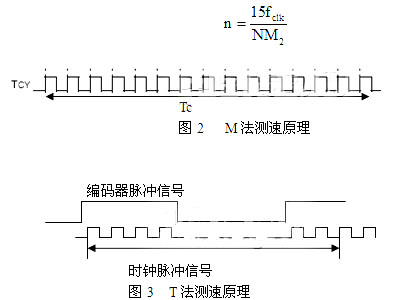
M法又称之为测频法,其测速原理是在规定的检测时间Tc内,对光电编码器输出的脉冲信号计数的测速方法,如图2所示,例如光电编码器是N线的,则每旋转一周可以有4N个脉冲,因为两路脉冲的上升沿与下降沿正好使编码器信号4倍频。现在假设检测时间是Tc,计数器的记录的脉冲数是M1,则电机的每分钟的转速为
在实际的测量中,时间Tc内的脉冲个数不一定正好是整数,而且存在最大半个脉冲的误差。如果要求测量的误差小于规定的范围,比如说是小于百分之一,那么M1就应该大于50。在一定的转速下要增大检测脉冲数M1以减小误差,可以增大检测时间Tc单考虑到实际的应用检测时间很短,例如伺服系统中的测量速度用于反馈控制,一般应在0.01秒以下。由此可见,减小测量误差的方法是采用高线数的光电编码器。
M法测速适用于测量高转速,因为对于给定的光电编码器线数N机测量时间Tc条件下,转速越高,计数脉冲M1越大,误差也就越小。
T法也称之为测周法,该测速方法是在一个脉冲周期内对时钟信号脉冲进行计数的方法,如图3所示。例如时钟频率为fclk,计数器记录的脉冲数为M2,光电编码器是N线的,每线输出4N个脉冲,那么电机的每分钟的转速为
为了减小误差,希望尽可能记录较多的脉冲数,因此T法测速适用于低速运行的场合。但转速太低,一个编码器输出脉冲的时间太长,时钟脉冲数会超过计数器最大计数值而产生溢出;另外,时间太长也会影响控制的快速性。与M法测速一样,选用线数较多的光电编码器可以提高对电机转速测量的快速性与精度。
M/T法测速是将M法和T法两种方法结合在一起使用,在一定的时间范围内,同时对光电编码器输出的脉冲个数M1和M2进行计数,则电机每分钟的转速为
实际工作时,在固定的Tc时间内对光电编码器的脉冲计数,在第一个光电编码器上升沿定时器开始定时,同时开始记录光电编码器和时钟脉冲数,定时器定时Tc时间到,对光电编码器的脉冲停止计数,而在下一个光电编码器的上升沿到来时刻,时钟脉冲才停止记录。采用M/T法既具有M法测速的高速优点,又具有T法测速的低速的优点,能够覆盖较广的转速范围,测量的精度也较高,在电机的控制中有着十分广泛的应用。
(二)使用增量式光电编码器来判别电机转速方向的原理
增量式光电编码器输出两路相位相差90o的脉冲信号A和B,当电机正转时,脉冲信号A的相位超前脉冲信号B的相位90o,此时逻辑电路处理后可形成高电平的方向信号Dir。当电机反转时,脉冲信号A的相位滞后脉冲信号B的相位90o,此时逻辑电路处理后的方向信号Dir为低电平。因此根据超前与滞后的关系可以确定电机的转向。其转速辩相的原理如图4所示
图4转向判别原理图
(三)、增量式光电编码器的反馈脉冲的四倍频原理
在使用增量式编码器时,通过计相位相差90o的两路正交脉冲信号A和B的上升沿与下降沿已达到将增量式编码器的反馈脉冲四倍频的目的。这样在不增加增量式光电编码器的线数的情况下,就可以获得更精度高的位置脉冲信息,以实现对电机位置的精确控制。其工作原理与脉冲的相位关系如图5所示
图5 脉冲四倍频相位关系图
结束语:
光电式编码器有着良好的抗干扰特性与应用的可靠性,在电机控制这种有着极高电磁感染的应用环境下有着广阔的应用前景。相信在不久的将来光电式编码器一定会在电机控制领域发挥更为重要的作用。而我们对于光电式编码器的研究也就显得格外的重要。
欢迎光临 中科因仑“3+1”工程特种兵精英论坛 (http://bbs.enlern.com/)
Powered by Discuz! X3.4